




运动控制解决方案。用户可直接将PCIE464嵌入标准PC机快速实现高性能的EtherCAT运动控制功能。
在“PC+运动控制卡”的模式下,可充分的利用PC的高效数据处理和开放性特性,以及控制卡高速PWM、多维位置比较输出PSO等功能,实现出色的多轴同步控制和高速点位以及复杂的轨迹运动控制等功能,确保了控制卡与上位机的无缝实时数据交互,极大提升运动控制的效率和精度,使其成为3C电子制造、半导体、装配、精密加工、锂电和光伏、机器人等领域单机或整条自动化产线的理想选择。

PCIE464是一款基于PCI Express的EtherCAT总线路高速数字输出,可实现多轴同步控制和高速数据传输,集成丰富的运动控制功能,包含多轴点位运动、位置锁存、直线插补,圆弧插补,连续轨迹的小线段前瞻,各种机器人与自定义机器人算法的控制,多种PSO控制等,满足多样化的工业应用需求。
正运动提供自主自研IDE-RTSys开发编程软件,PCIE464控制卡支持多种上位机语言开发,均可调用同一套API函数库,易与现有的工业控制管理系统集成,极大地提高了工程师进行二次开发的效率,加速设备的部署和应用。
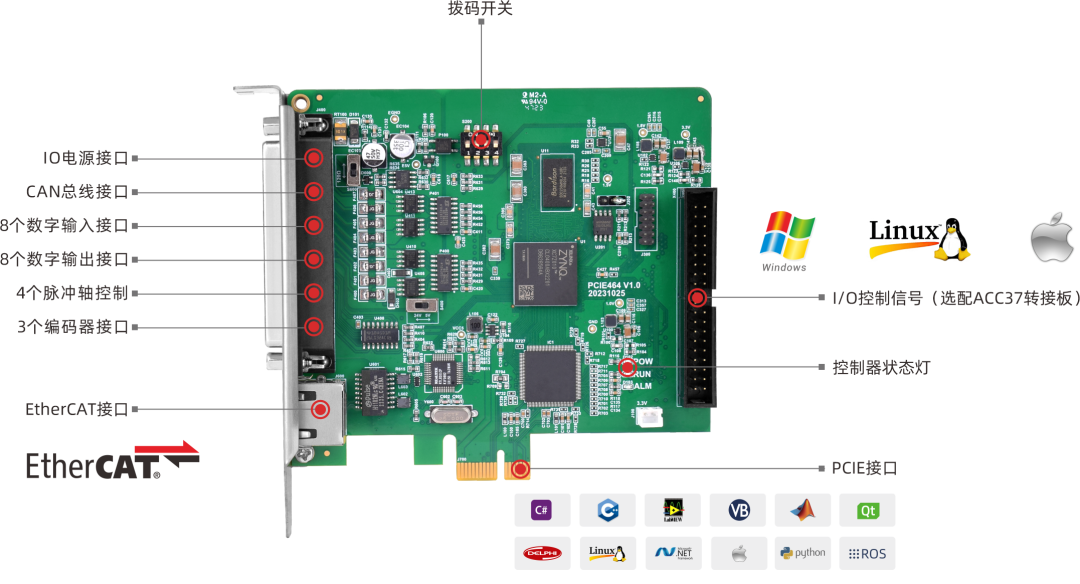
(1)可选6-64轴运动控制,支持EtherCAT总线/脉冲/步进伺服驱动器;
(3)标配8进8出,其中4路高速锁存输入和8路高速PWM、PSO输出,更多IO请选配ACC37接线)支持PWM输出、精准输出、PSO硬件位置比较输出、视觉飞拍等;
手模型正逆解模型算法,比如SCARA、Delta、UVW、4轴/5轴 RTCP...;(6)支持掉电存储和掉电中断,提供程序更安全机制;
(7)具有螺距补偿控制,在单轴上通过多个补偿点进行精确调整,以此来实现更高的加工精度。
PCIE464控制卡的高速硬件位置比较输出PSO功能,相较于传统PC的软比较方式,实现了显著的效率和精度提升,能够在整个运动轨迹中以固定的距离触发输出
而不用考虑总体速度,即使在圆弧拐角部分减速的同时也能保证输出间距恒定,这样在保证加工效果的同时,最大限度地提高了产能,常用于高精密点胶和激光能量控制的应用场合。

PCIE464控制卡支持6至64轴的运动控制,适用于从单轴到复杂多轴协调的各类运动控制项目。
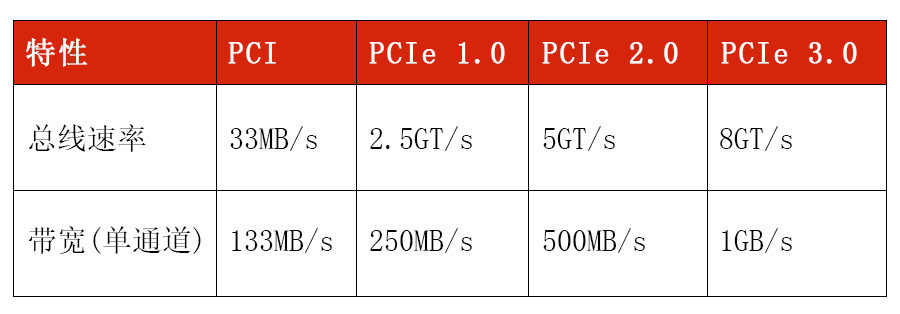
PCIE464控制卡是基于PCI Express总线通讯,提高数据处理速度,缩短指令执行时间。
的拥堵和冲突,每个PCIE464控制卡拥有独立的的通信通道,可以直接与CPU进行数据交换,无需等待别的设备释放总线资源,以此来实现更高的数据传输速率。非常适合于高速数据采集、高速数据处理等工业应用场合。
PCIE464控制卡可支持多种类型的开放的上位机API调用,可轻松集成到不同的运动
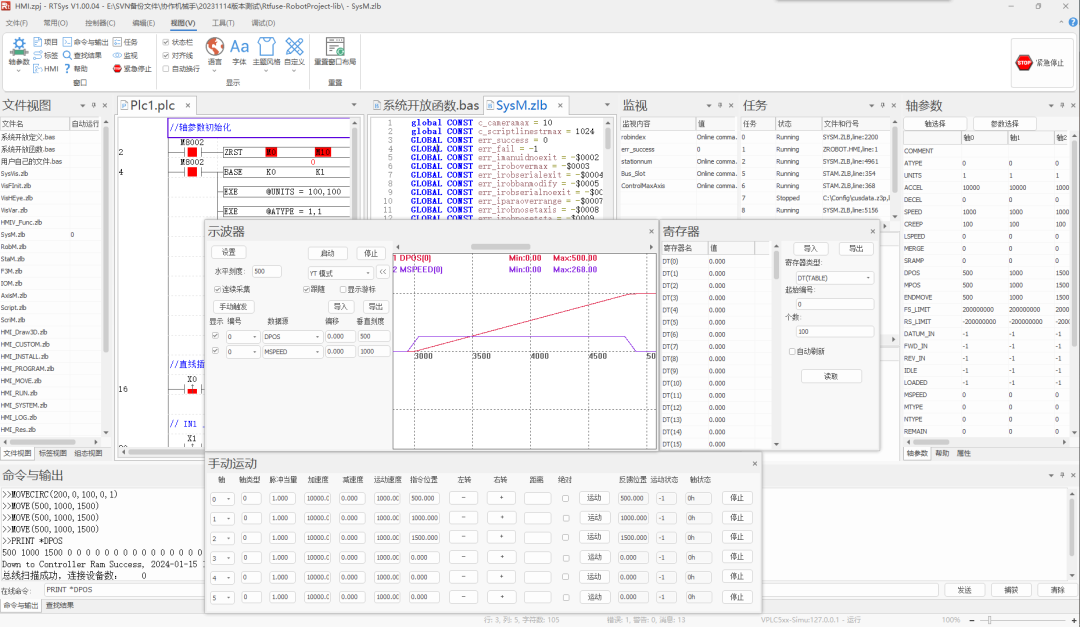
PCIE464控制卡可支持RTSys+其他高级上位机编程语言的混合编程支持,可以有效的进行RTBasic实时多任务处理,极大地提高了指令的实时执行效率。
PCIE464控制卡支持内置的C语言编译程序运行,编译过程可直接在控制卡本身自带的RTSys IDE开发环境进行,无需依赖外部软件环境编译代码,来提升工程师的开发效率,简化项目程序的创建和部署流程。
PCIE464控制卡在EtherCAT同步周期上实现了明显优化,控制周期最小可达100μs,相比于传统的250μs至1000μs控制周期,大幅度的提高了响应速度和整体控制效率。
PCIE464控制卡内置掉电存储功能,可确保控制管理系统在遭遇断电或重启时,关键数据不会丢失,提高了系统的可靠性。
PCIE464控制卡内置掉电中断功能,当CPU在执行程序过程中遇到卡掉电等不正常的情况时,掉电中断机制会立即响应。
在中断程序中关键数据和自定义变量可直接保存到,后续设备再上电时可根据自定义变量,迅速恢复到断电前的状态,包括位置坐标、设备关键
等。掉电中断可减少了重启后的程序重新校准等时间,减少停机时间,提高效率。
PCIE464控制卡内置RTBasic程序多任务执行,可内置自定义的安全机制程序,可确保Windows系统在蓝屏的情况下,控制卡程序按照预设的方案自动安全停机,设备正常运行不可能会出现不可控动作,实现更安全的生产制造。
PCIE464控制卡可内置客户自己独特的行业工艺与行业know-how知识产权,给客户提供自定义的加密和授权方式,有很大成效避免了没有经过授权或盗版的软件风险,客户知识产权更有保障,使用更放心!
设备、半导体设备、SMT加工、激光加工、光通讯设备、锂电及光伏设备,还是非标自动化设备等高速高精应用领域,全新的PCIE4控制卡都将提供高品质使用体验和显著的速度提升。对PCIE464控制卡感兴趣或有具体项目需求的客户,请立即联系我们的销售团队,以便我们能第一时间为您提供优质的服务和支持。

曲线,主要介绍一下如何通过在线命令封装自己想使用的Basic指令到上位机接口中供上位机调用。
轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴、机械手指令等;采用优化的网络通讯协议可以实现
,后面接1伺服电机,3步进电机,带动三自由度的滚柱丝杠,想请问一下:已经实现了基本功能(如:插补,回零等),后面还能做什么,也就是在这基础上的后续工作大概都有
各位大神们,有没有好的书籍或者学习资料推荐给我,是关于LabVIEW如何配合
,没有接触过上位机不知道如何入手,希望大神给我指条明路。我该从何开始学起。不胜感激!先谢谢大家了!
学习笔记1说明1.硬件介绍2.准备工作3. PMAC与上位机的连接4.创建自己的伺服
项目5. 学习途径说明&
,三轴的,有没有大佬能帮忙推荐,最好是便宜点的能应用在LABVIEW上的。
系统。以前没有编写过大型的系统,没什么经验,大侠们有没有相关的资料,特别是编写的相关的例子。单轴,双轴,三轴的就行了~~~求救呀~~~{:4:}
性问题; 4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量
本帖最后由 eehome 于 2013-1-5 10:06 编辑 六轴
应用开发教程之Python。一 、ECI2828硬件介绍ECI2828系列
支持多达16轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴和机械手指令等;采用优化的网络通讯协议可以实现
。然后我的电机的每个时刻的转角位置已经导入txt格式的文本中,,那么这个程序该怎么写啊?求大神回复
本帖最后由 qiuzhichang 于 2015-4-12 12:56 编辑 基于固高公司
,我需要在LabVIEW程序框图中如何编写这样的程序,请各位能够帮帮我!!!
性要求特别高的场合也适用; 6、对于环境不好的场合,时间长了工控机容易进灰尘,ECI
位置及速度测量,编码器的实验讲解等。 主要有以下5个实验课程: (1)
的电源遗失了,这个如何配供电电源,就是普通24v电源就可以了么,求解释,谢谢
型号:PCI-1245e1.在驱动盘中的labviewDrive即研华提供的labview例程后,控件中的新控件全显示问号,而新函数没问题。2.驱动后电脑可读取
怎样能够与笔记本LABVIEW通信,接口不匹配,没有可以和笔记本连接的数据线,有没有很好的方法可以转换的?大家帮帮忙!
电机定长加减速实验文章目录第二章:基于Visual C++ 6.0使用
,但无法使电机运行(已检查过硬件连线,使用脉冲发生器提供连续方波可使电机连续运转)简单写了个vi,也不能
XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
XPCIE1028 ,实现15000+pcs/分钟的IO触发检测速度!# 视觉筛选
XPCIE1028亮相。此外,我们还为您准备了的新互动模式,您将有机会赢得超值礼品!
